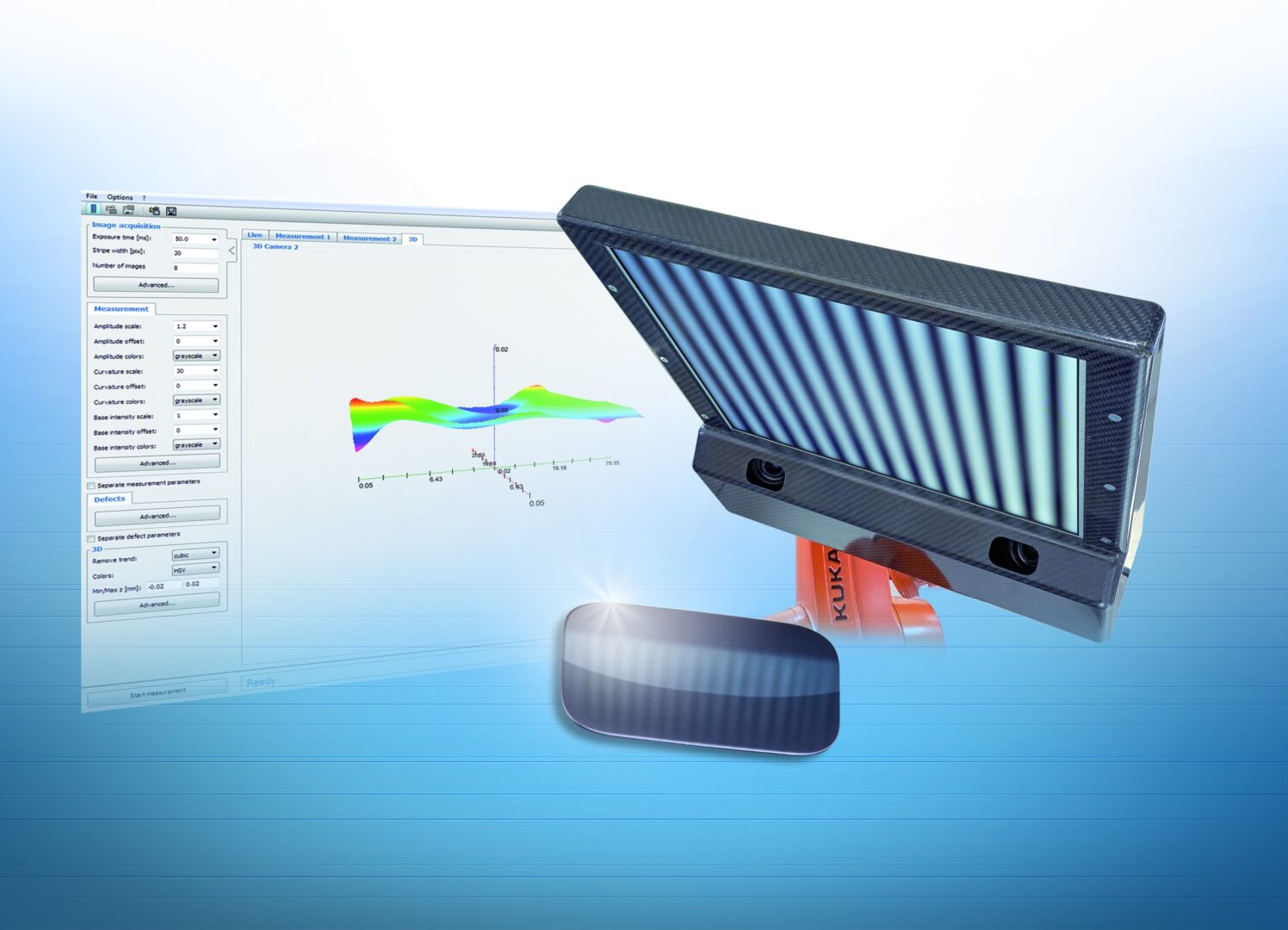
# Projection de franges de lumière sur l'objet de mesure
# Enregistrement par une caméra et évaluation par un logiciel des déviations dans les franges causées les défauts de surface
# Inspection 3D de pièces aux géométries complexes (surfaces jusqu'à 210 x 86 mm)
# Résolution latérale : 65 à 75 µm
# Vitesse inférieure à 2 s par position de mesure
# Capteur guidé sur l'objet à mesurer via un robot composé d’un écran pour la projection des franges et de deux caméras
# Programme du robot créé à partir du modèle 3D de l’objet à mesurer
Micro-Epsilon France



