Le projet de recherche européen IMOCO (Intelligent Motion Control) et l’allemand Still devraient autonomiser ces engins d’ici fin 2024.
Si les appareils actuels reconnaissent les obstacles et freinent en conséquence, ils ne peuvent pas encore mettre en place des stratégies autodéterminées d’évitement des obstacles, ou encore mener en temps réel une recherche intelligente des itinéraires les plus efficaces intégrant une analyse continue de l’environnement. Pour y parvenir, ils doivent être équipés de capteurs très sensibles.
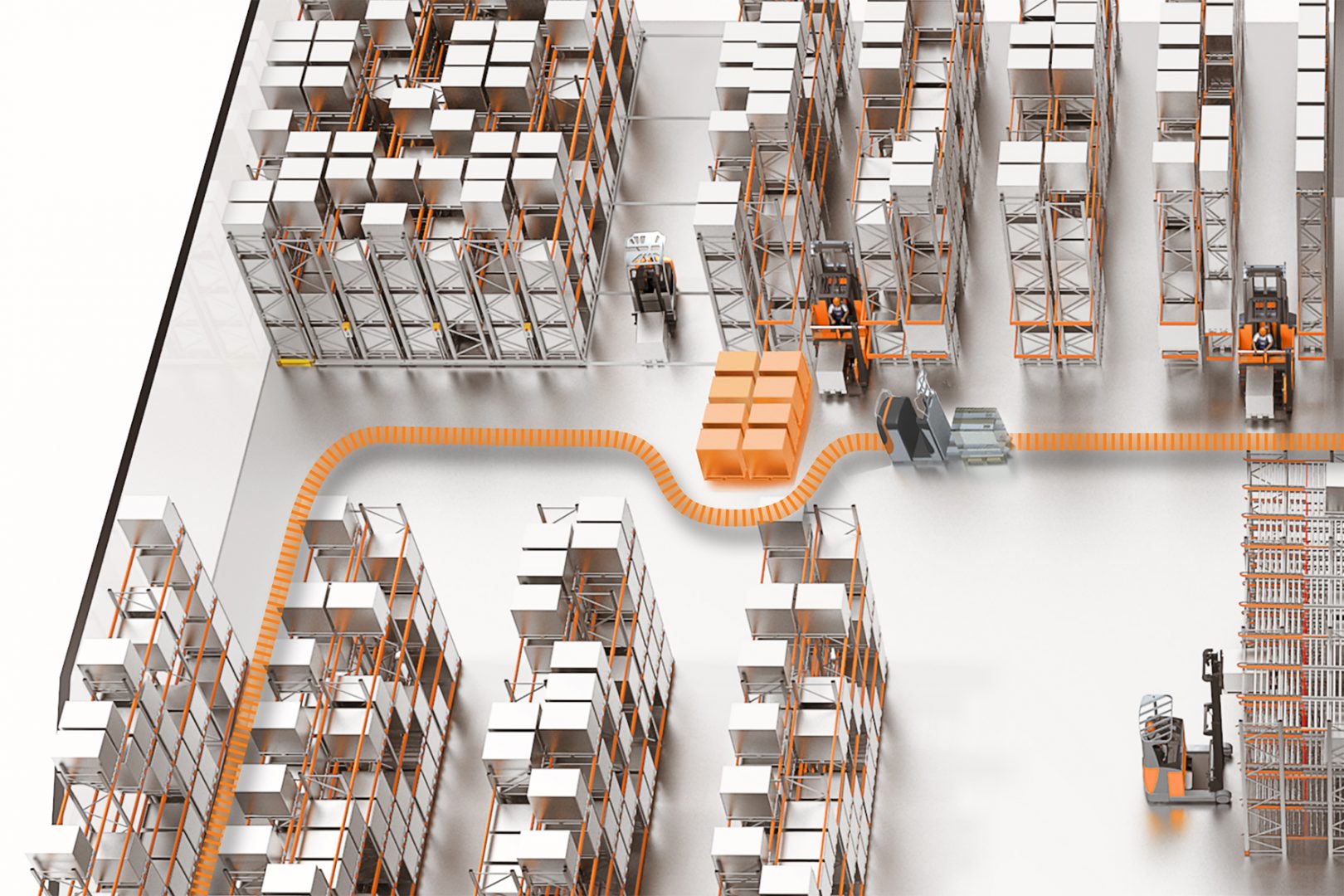
L’OPX iGo neo de Still se déplace de manière autonome dans les allées, perçoit et comprend son environnement et adapte ses actions en conséquence. Par contre, ce chariot ne parvient pas encore à circuler hors des allées de rayonnages de manière totalement autonome, ni à naviguer sans guidage externe sur le site du client tout en planifiant des trajets optimaux. Cependant, comme l’OPX iGo neo est déjà équipé des capteurs environnementaux appropriés, il constitue une bonne plate-forme de départ pour les développements à venir du projet IMOCO. À cette fin, quatre scénarios ont été définis, avec pour socle le principe des jumeaux numériques et les avancées de l’IA en termes d’apprentissage automatique et d’apprentissage profond, le tout afin d’assurer une navigation intelligente, la collecte des marchandises, le transport et le placement à destination.
« Le but est d’accéder à une véritable indépendance opérationnelle sur tout le site du client. À ce niveau, les approches de type apprentissage automatique et apprentissage en profondeur jouent un rôle très important » , explique Ansgar Bergmann, responsable du projet IMOCO chez Still.



