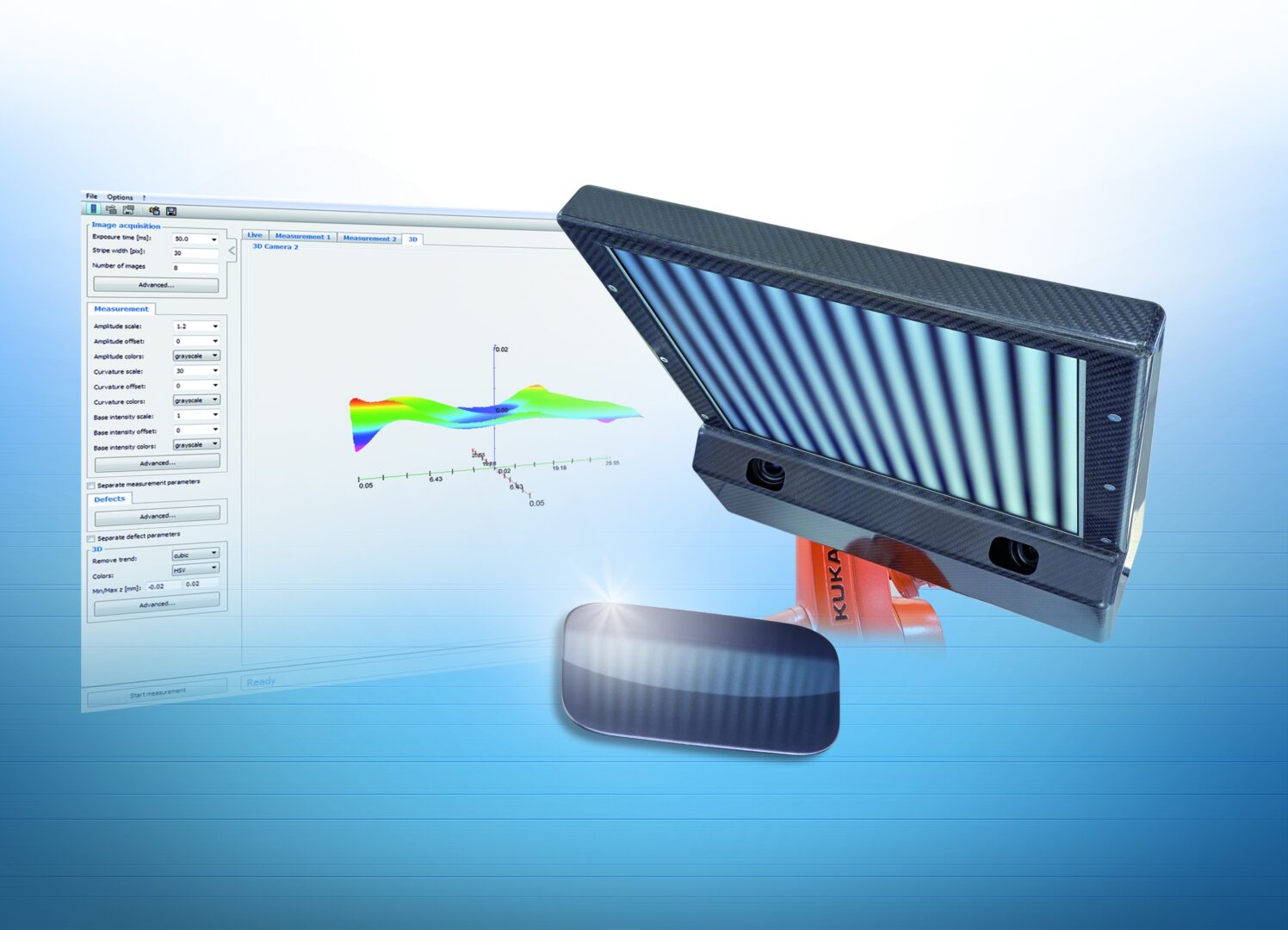
# Projection de franges de lumière sur l'objet
# Surfaces mesurables : jusque 210 x 86 mm
# Enregistrement des déviations via 2 caméras
# Logiciel d'évaluation
# Programme du robot créé à partir du modèle 3D (CAD)
# Sortie des défauts dans le modèle 3D
Micro-Epsilon France
www.micro-epsilon.fr